Studio + multiple sparse
- When use this: sparse cameras, hard to initialize for colmap;
- Idea: Chessboard for initialization. Merge feature points from different frames and BA together.
- Here you can find the example data.
Initialization
├── ground1f
│ └── images
└── intri
└── images
Capture
intri
ground
Run
# detect the chessboard
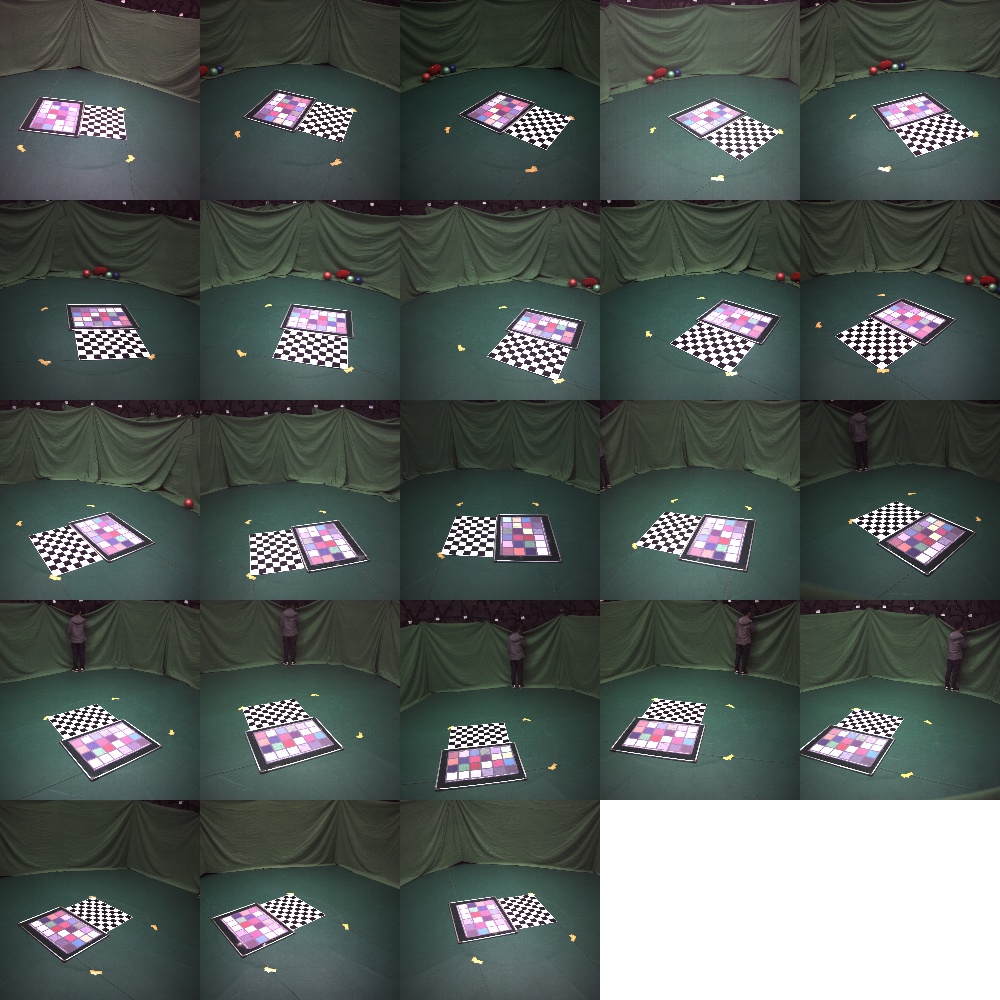
python3 apps/calibration/detect_chessboard.py ${root}/intri --out ${root}/intri/output --pattern 9,6 --grid 0.1
# detect the chessboard
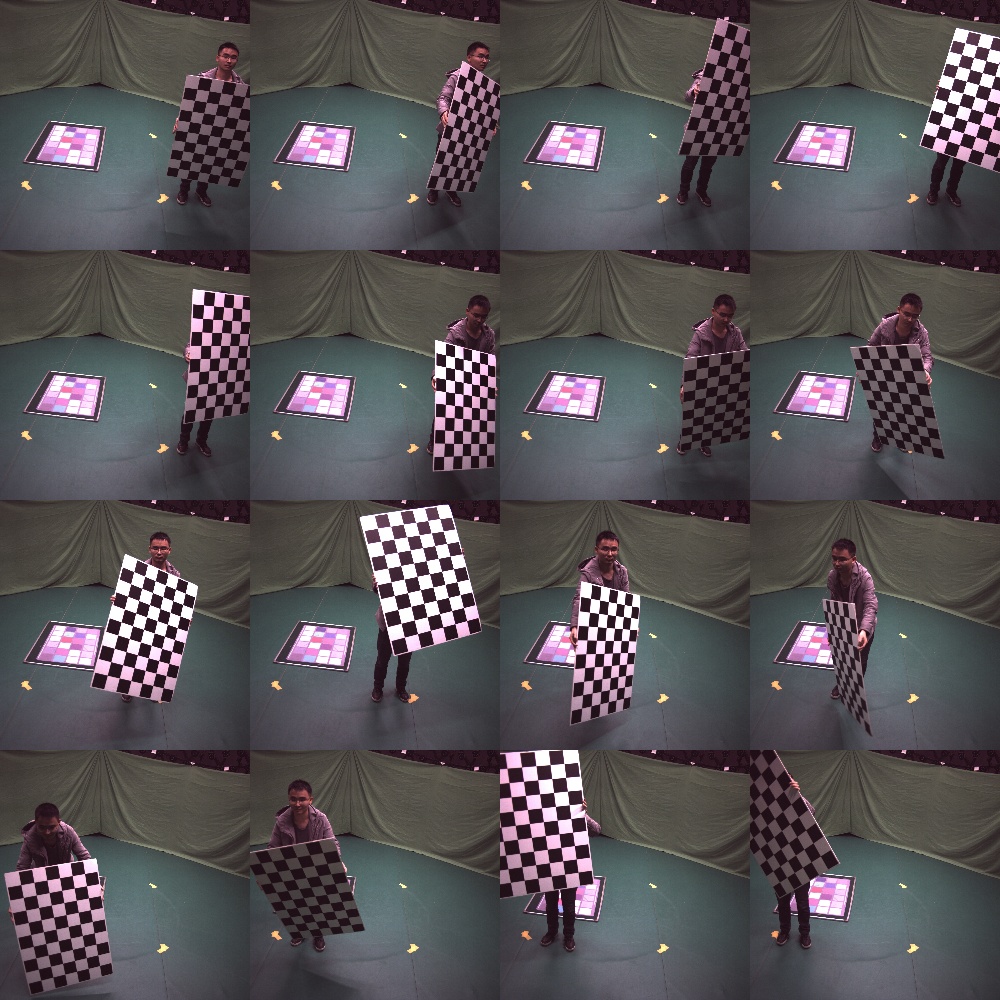
python3 apps/calibration/detect_chessboard.py ${root}/ground1f --out ${root}/ground1f/output --pattern 9,6 --grid 0.1 --check
# Run this if auto-detect failed
python3 apps/annotation/annot_calib.py ${root}/ground1f --mode chessboard --annot chessboard
Calibrate:
# calibrate the intrinsic
python3 apps/calibration/calib_intri.py ${root}/intri
# calibrate the extrinsic
python3 apps/calibration/calib_extri.py ${root}/ground1f --intri ${root}/intri/output/intri.yml
Check the calibration
python3 apps/calibration/check_calib.py ${root}/ground1f --out ${root}/ground1f --mode cube --write
Check ${root}/ground1f/cube, or run with flag --show to visualize.

cube
Previous step is enough for camera calibration. The next step is for the advanced developers.
Capture a static scene with multiple person and calibrate them with colmap.
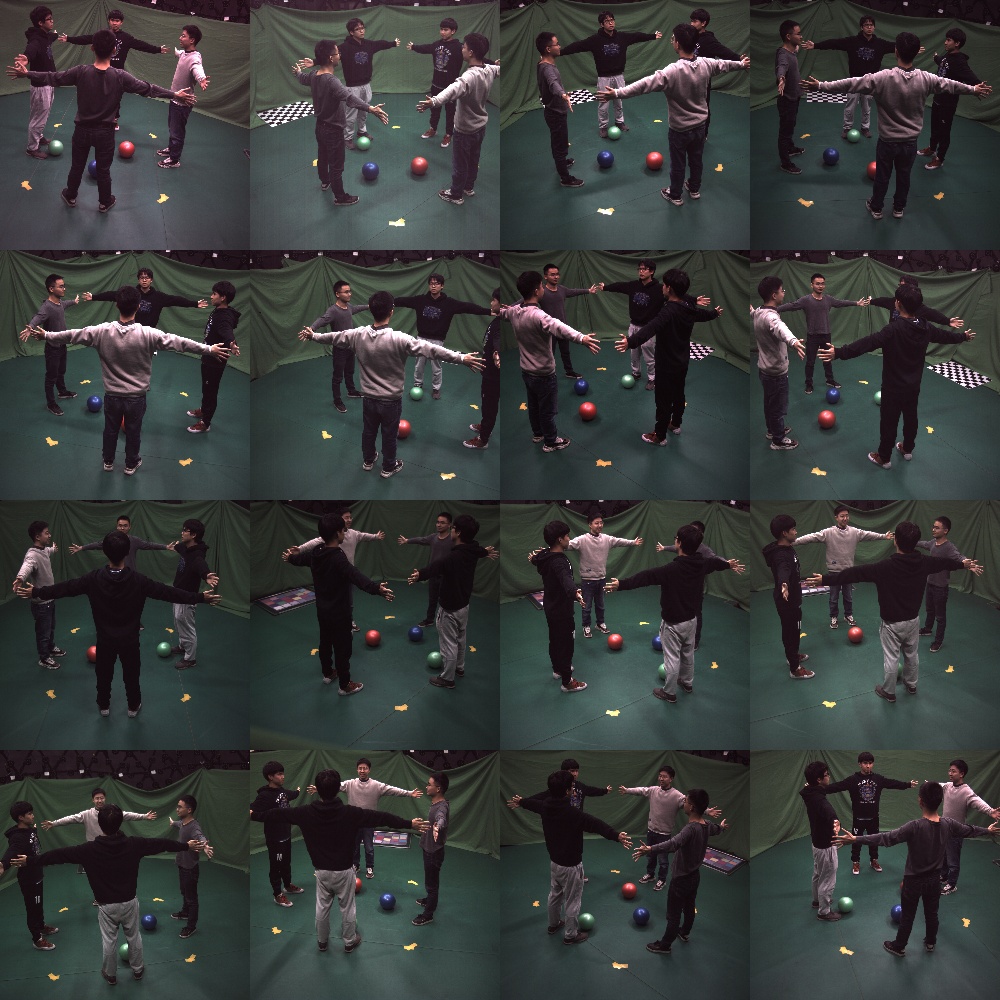
cube
python3 apps/calibration/calib_sparse_by_colmap.py ${root}/human519 --init ${root}/ground1f --out /mnt/data2/shuai/calib-zjumocap --colmap ${colmap}
Studio + multiple sparse videos
- When use this: sparse cameras, hard to initialize for colmap;
- Idea: Merge features from multiple frames => calibrate with colmap => scale and align with chessboard
- Here you can find the example data.
${root}
├── 506
├── 508
└── ground1f
Run colmap
python3 apps/calibration/calib_pycolmap.py ${root} ${root}/calib --share_camera --step 100 --seqs 506 508
$colmap gui --database_path ${root}/calib/merged/database.db --image_path ${root}/calib/merged/images --import_path ${root}/calib/merged/sparse/0
Align with the chessboard
python3 apps/calibration/detect_chessboard.py ${root}/ground1f --out ${root}/ground1f/output --pattern 9,6 --grid 0.1
python3 apps/calibration/align_colmap_ground.py ${root}/calib/merged/sparse/0 ${root}/colmap-align --plane_by_chessboard ${root}/ground1f --scale2d 0.5
cp ${root}/colmap-align/*.yml ${root}/506
cp ${root}/colmap-align/*.yml ${root}/508