Studio + multiple dense
- When use this: dense cameras, simply calibrate by colmap;
- Idea: Use texture human body to calibrate the dense rig.
- Example data: here
Capture
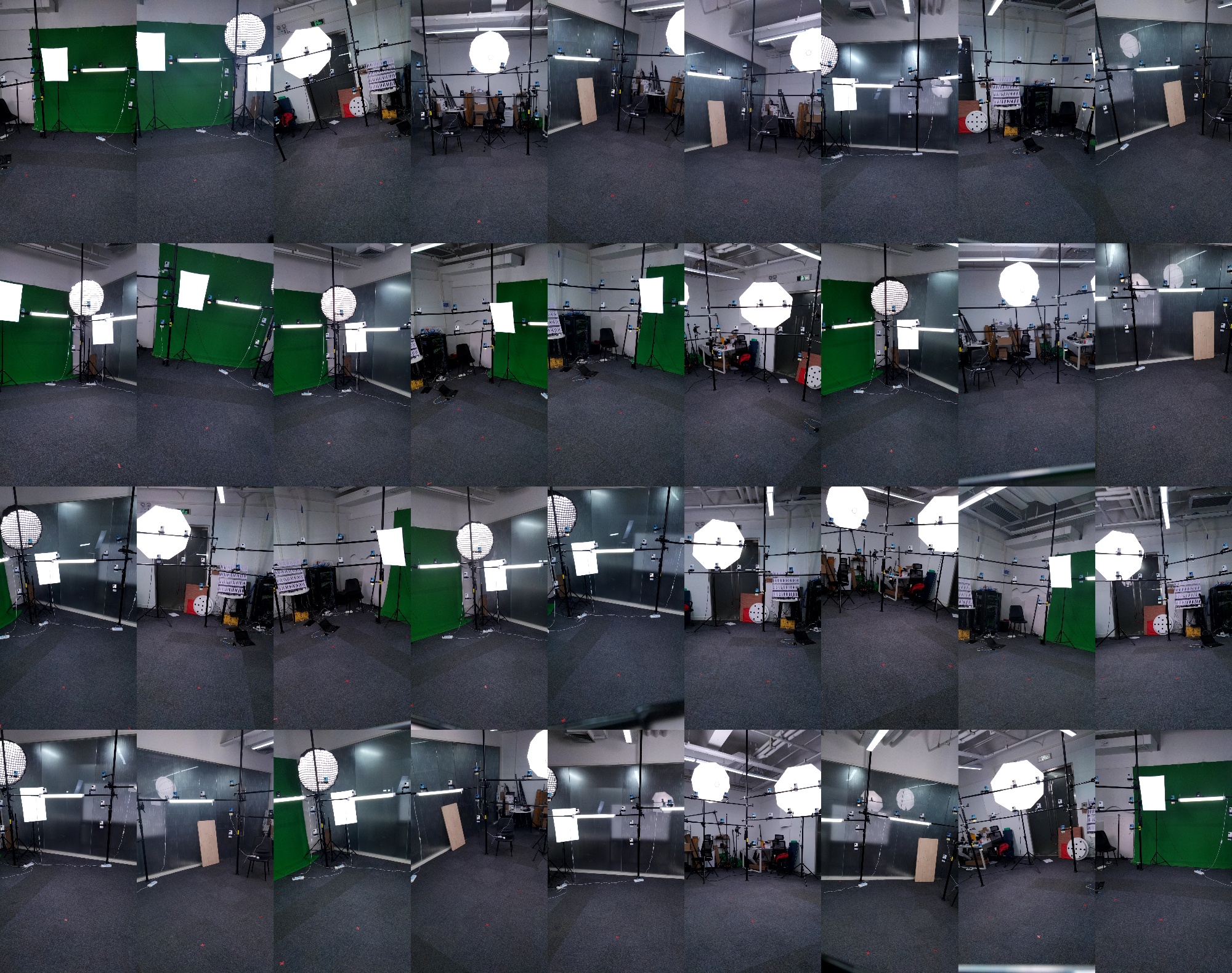
background
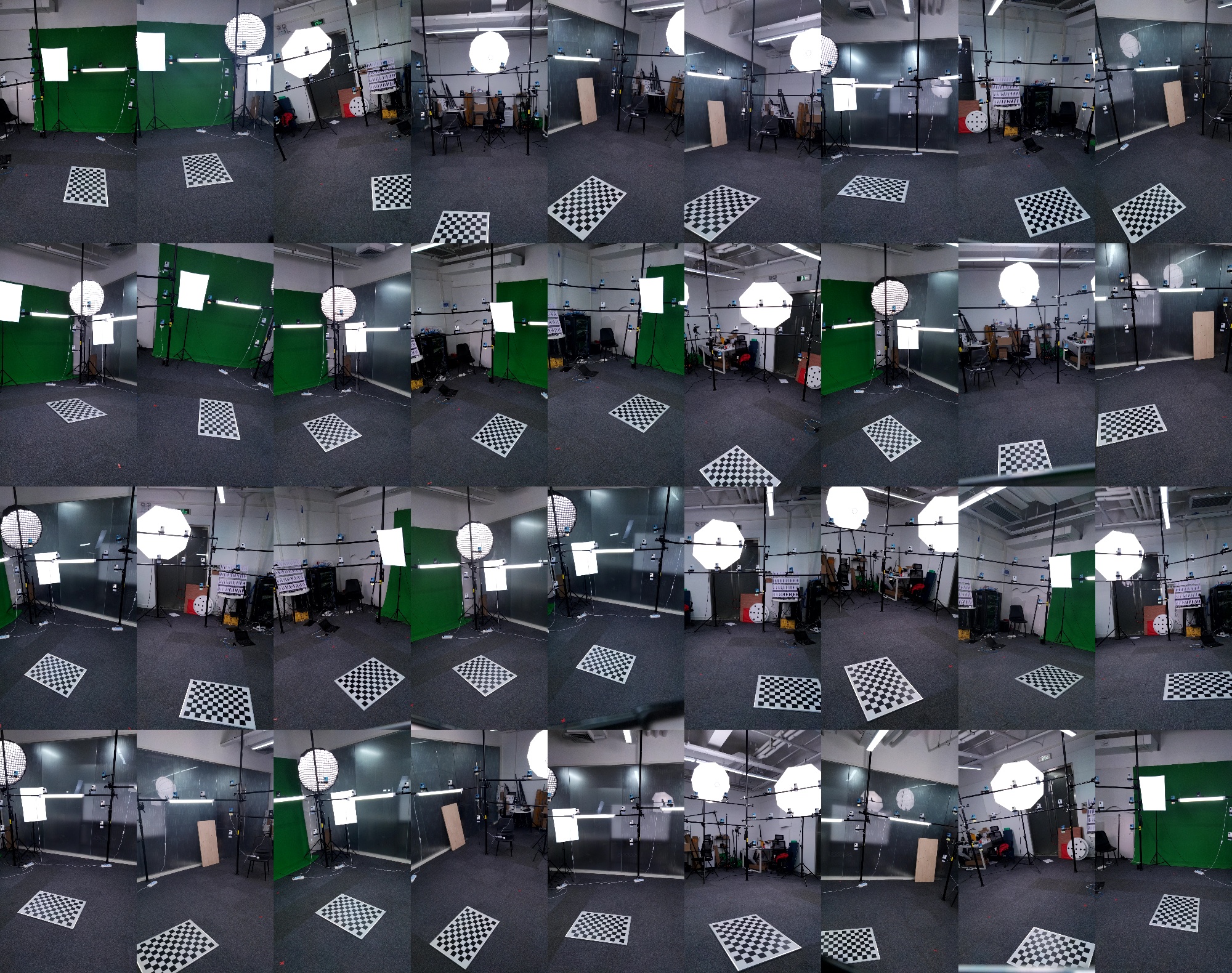
ground
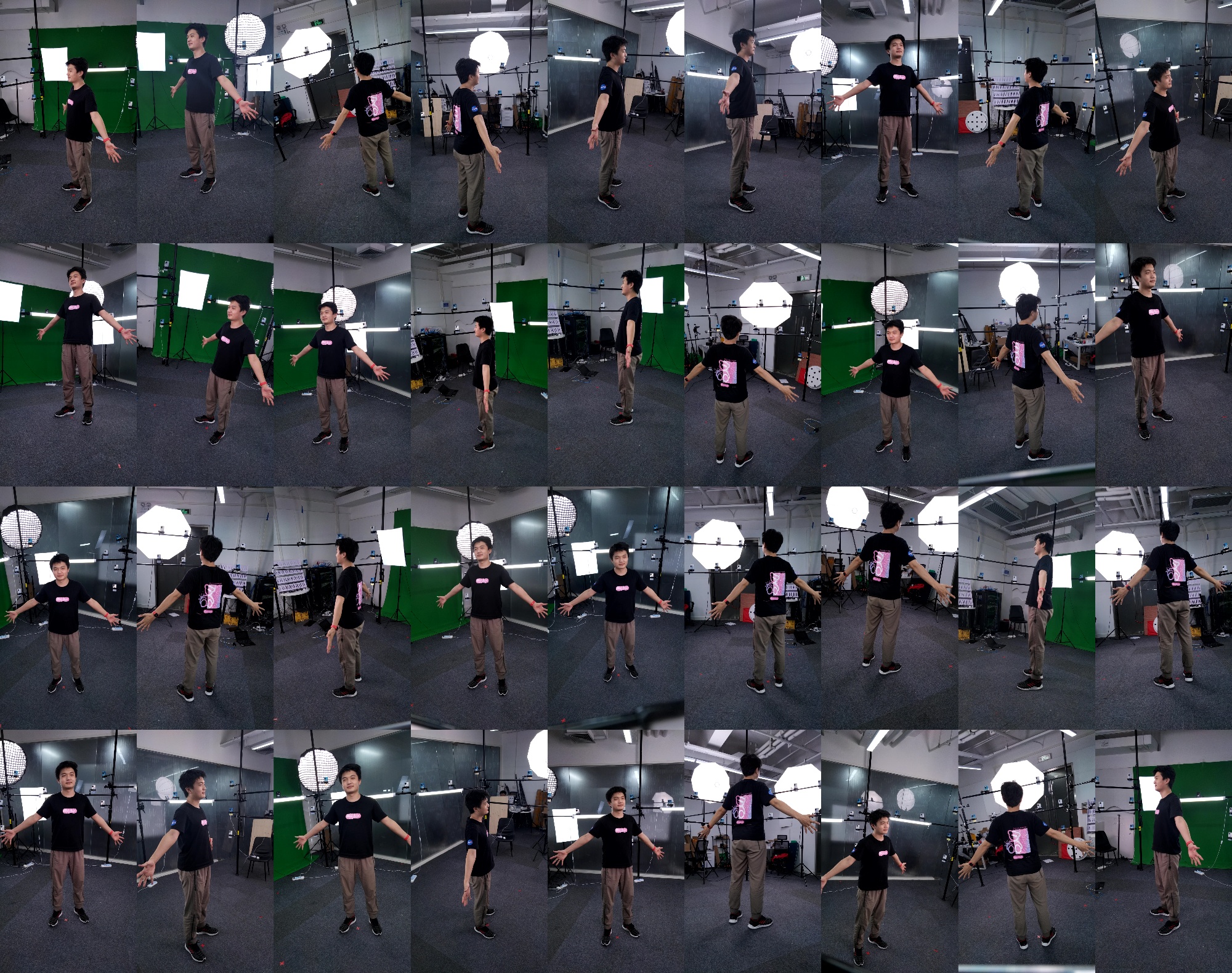
human
Place the data as follows. You can use script to copy the data from raw data:
python3 scripts/preprocess/copy_dataset.py <path/to/rawdata> ${root}/ground1f --start 0 --end 1
After this:
<root>
├── background1f
│ └── images
├── human1f
│ └── images
└── ground1f
└── images
Calibrate
Always, we calibrate the camera with human1f which can provide more feature points in the surface. Alternatively, you can use background1f or ground1f.
python3 apps/calibration/calib_dense_by_colmap.py ${root}/human1f ${root}/colmap-human1f --share_camera --colmap ${colmap}
Visualize the results with colmap.
$colmap gui --database_path ${root}/colmap-human1f/database.db --image_path ${root}/colmap-human1f/images --import_path ${root}/colmap-human1f/sparse/0
Detect the chessboard:
python3 apps/calibration/detect_chessboard.py ${root}/ground1f --out ${root}/ground1f/output --pattern 11,8 --grid 0.06
If the chessboard is so small that can not be detected automaticly. You should manually annotate it.
python3 apps/calibration/create_marker.py ${root}/ground1f --grid 0.6 0.42 --corner --overwrite
python3 apps/annotation/annot_calib.py ${root}/ground1f --annot chessboard --mode chessboard --pattern 2,2
If you use ChAruco, following this:
python3 apps/calibration/detect_charuco.py ${root}/ground1f --mode sparse --show
Align the camera parameters:
python3 apps/calibration/align_colmap_ground.py ${root}/colmap-human1f/sparse/0 ${root}/colmap-align --plane_by_chessboard ${root}/ground1f
Check the camera parameters:
python3 apps/calibration/check_calib.py ${root}/ground1f --mode cube --out ${root}/colmap-align --show
python3 apps/calibration/check_calib.py ${root}/ground1f --mode match --out ${root}/colmap-align --show --annot chessboard
Check with Instant-ngp
Currently, ngp only supports cameras with the same camera intrinsics.
# convert the data
python3 apps/calibration/easymocap2nerf.py ${root}/human1f --out ${root}/ngp-human1f --aabb_scale 4 --frame 0
# train and visualize ngp
cd 3rdparty/instant-ngp
data=${root}/human1f
# interactively
./build/testbed --scene ${root}/ngp-human1f
# or run in background
python3 scripts/run.py --scene ${data} --mode nerf --screenshot_transforms ${data}/transforms_novel.json --n_steps 100000 --width 1080 --height 1920 --screenshot_dir ${data}/output --save_snapshot ${data}/ckpt.msgpack