Try the code
Next, we will discuss one of the challenging problems in the field of human motion capture: recovering multiple people’s poses from multi-view videos. This problem involves a wide range of variations in camera setups, scene sizes, the number of people in the scene, and the distribution of their motion speeds. Therefore, it is necessary to use different configurations for different types of data.
We will use the scenario settings of ZJUMoCap as an example to illustrate our algorithmic process.The example dataset can be download from 04_multiperson/ballet_2person.zip. After downloading, unzip it to the data/examples folder.
Install the matching extension first:
cd library/pymatch
python3 setup.py develop
Then, run the following command:
data=data/examples/ballet_2person
emc --cfg config/mvmp/body/ballet_2person.yml --root ${data}
The skeletons and fitted SMPL results.
Basic Idea
- Matching: We employ low-rank matrix optimization to establish correspondences between individuals in multi-view.
- Optimization: We fit the SMPL model to each person individually to obtain their respective poses.
Step-by-step Explanation
The config file is config/mvmp/body/ballet_2person.yml. This file use two base config:
data: config/datasets/mvimage.yml
exp: config/mvmp/detect_match_triangulate_fitSMPL.yml
data_opts:
... # set the options for this dataset
exp_opts:
... # set the options for this experiment
dataset
Using the config/datasets/mvimage.yml configuration file, we follow the same approach as in the previous single-person multi-view case.
at_step
Detect
In multi-person scenarios, we utilize YOLO and HRNet or ViTPose for human keypoint detection, similar to the single-person case. However, we apply additional filtering to remove excessively large or small bounding boxes. This filtering step helps improve the accuracy of detected keypoints by eliminating outliers that do not correspond to valid human poses.
detect:
module: myeasymocap.backbone.yolo.yolo.MultiPerson # Use YOLO to detect multi-person
key_from_data: [images, imgnames]
args:
model: yolov5m
name: person
min_length: 150 # this two threshold control the wanted bboxes
max_length: 1000
keypoints2d:
module: myeasymocap.backbone.hrnet.myhrnet.MyHRNet
key_from_data: [images, imgnames]
key_from_previous: [bbox]
key_keep: []
args:
ckpt: data/models/pose_hrnet_w48_384x288.pth
single_person: False # This flag controls the function to detect all keypoints
Match
This section utilizes the defined class myeasymocap.operations.match_base.MatchAndTrack, which primarily consists of two modules:
class MatchAndTrack():
def __init__(self, cfg_match, cfg_track) -> None:
self.matcher = MatchBase(cfg_match)
self.tracker = TrackBase(cfg_track)
The matcher module is responsible for matching multiple individuals in a multi-view setting, while the tracker module handles tracking individuals across multiple frames.
The main parameters of the matcher module include:
-
distance: A module used to calculate the similarity between two individuals.-
mode: By default, it uses theepipolarmode, which employs epipolar geometry to calculate the distance between two individuals in different views. -
threshold: The epipolar distance is normalized by the camera focal length. This parameter controls the inlier threshold for matching. -
threshold_track: Inlier threshold for matching during tracking. -
min_common_joints: Controls the minimum number of common keypoints required for a valid pair. -
cfg_svt: Parameters used to control the SVT (Singular Value Thresholding) optimization.
-
-
triangulate:-
min_view: The minimum number of views required for triangulation. -
dist_max: The maximum allowable reprojection error during triangulation. -
dist_track: The maximum distance in mm between the current frame and the previous frame.
-
These parameters play a crucial role in determining the quality of matching and triangulation results. For detailed configuration options, please refer to the corresponding configuration file.
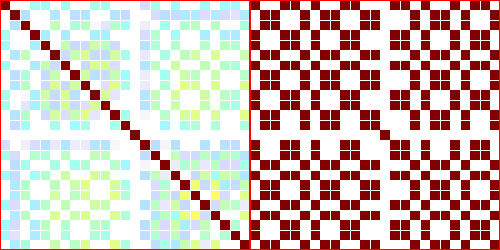
SVT: The matrix on the left represents the affinity matrix computed through the distance module. The matrix on the right represents the low-rank matrix obtained after optimization using SVT.
The tracker module is responsible for maintaining records of all individuals in the scene, including adding and removing individuals, as well as filtering out individuals outside the desired scene.
The cfg_track parameter controls the parameters of the tracker module, including:
-
max_missing: Specifies the maximum number of consecutive frames an individual can be missing before being considered lost. -
final_ranges: Defines the desired valid spatial range for the final output.
For the complete configuration of this module, please refer to the corresponding configuration file.
at_final
We fit the SMPL model to 3D keypoints for each person. The main step is as follow:
collect: # split the results of each frame to each person
load_body_model: # Load the SMPL model
fitting_each_person:
module: myeasymocap.stages.basestage.StageForFittingEach
key_from_previous: [model, results]
key_from_data: []
args:
stages: _file_/config/mvmp/meta_fit_SMPL.yml
# load the multistage configuration file
keys_keep: [params]
write: ...
vis_render: ... # render the SMPL results
More Examples
The data can be downloaded from 04_multiperson/{name}.zip at url, and the config can be found in config/mvmp/body/{name}.yml.
| Name | Preview |
|---|---|
| boxing |
|
| soccer1_6 |
|
Multi-object
TODO