MobileStage工作流
数据采集
采集一个场景时,按以下步骤核对:
- 记录当前时间、使用相机数目、ISO
- 使用一个额外的手机,采集场景,采集时运动要慢一点,不然会有运动模糊
- 采集标定数据:每次相机被动到了都要重新标定
- 开启相机采集空白背景
- 采集标定板放在地上
- 采集运动数据
- 开启手机
- 打板
- 保持静止一帧
- 运动
- 结束时保持静止
- 打板
- 结束采集
如果是手动触碰手机进行的采集,那么采集一次的时候要同时把标定数据和运动数据一起采集
数据拷贝
在目录/nas/dataset/XiaoMiMocap下建立当前日期的文件夹,将采集目录的videos目录拷贝或软链接到日期目录。例如
<20220511>
├── ba
│ └── videos
├── background
│ └── videos
├── ground
│ └── videos
├── data0
│ └── videos
├── data1
│ └── videos
│ ...
└── test
└── videos
注意,不要直接把数据文件夹链接过来,正确的操作为
mkdir -p ba/videos && cd ba/videos
ln /nas/dataset/xiaomi_test/<data>/<seq>/videos/* ./
提取图片
手机充电口朝右的时候拍摄的视频,使用--transpose 2参数将视频旋转正确。
root=/path/to/root
for seq in $(ls ${root});do python3 apps/preprocess/extract_image.py ${root}/${seq} --transpose 2;done
python3 scripts/preprocess/copy_dataset.py ${root}/ground ${root}/ground1f --start 0 --end 1
python3 scripts/preprocess/copy_dataset.py ${root}/background ${root}/background1f --start 0 --end 1
查看采集的图片同步情况
python3 apps/annotation/annot_mv_sync.py ${root}/ba
主要查看内容:
- 开始时打板是否同一帧
- 结束时的打板是否同一帧
- 不同序列之间不同步的相机是否固定
棋盘格标定:移动棋盘格标定内参+静止帧标定外参
这个方法适用于室内小场景,视角密集的情况。整理数据如下所示
<root>
├── ba # 存放棋盘格移动着标定相机的结果
│ └── images
└── ground1f # 存放放置棋盘格的结果
└── images
step0: 自动检测棋盘格:
root=<path/to/root>
# 检测棋盘格
python3 apps/calibration/detect_chessboard.py ${root}/ground1f --out ${root}/ground1f/output --pattern 11,8 --grid 0.06
python3 apps/calibration/detect_chessboard.py ${root}/ba --out ${root}/ba/output --pattern 11,8 --grid 0.06 --seq --max_step 32 --min_step 8
# 检查棋盘格
python3 apps/annotation/annot_calib.py ${root}/ground1f --annot chessboard --mode chessboard --pattern 11,8
# 标定相机内参
python3 apps/calibration/calib_intri.py ${root}/ba --num 200 --share_intri
# 标定相机外参
python3 apps/calibration/calib_extri.py ${root}/ground1f --intri ${root}/ba/output/intri.yml
# 检查相机外参
python3 apps/calibration/check_calib.py ${root}/ground1f --mode match --out ${root}/ground1f --show --grid_step 0.42 --annot chessboard
正常情况对于1920x1080的图片,这里的误差需要小于1 pixel。
棋盘格标定:移动棋盘格标定内参+静止帧标定外参+移动棋盘格进行BA
这个方法通常可以获得更高的精度,前提是需要多相机同步性能较好。
标定方案选择:
- 密集视角+室内 => colmap静止背景标定+静止棋盘格对齐
- 上面不work => colmapN帧包含人的数据同时标定+静止棋盘格对齐
colmap使用的版本为3.6,已知使用3.8会有数据格式不一致的问题
colmap标定:colmap静止背景+静止棋盘格
这个方法适用于室内小场景,视角密集的情况。整理数据如下所示
├── background1f # 存放背景的单帧的结果
│ └── images
└── ground1f # 存放放置棋盘格的结果
└── images
step0: 自动检测棋盘格:
root=<path/to/root>
# 检测棋盘格
python3 apps/calibration/detect_chessboard.py ${root}/ground1f --out ${root}/ground1f/output --pattern 11,8 --grid 0.06
# 检查棋盘格
python3 apps/annotation/annot_calib.py ${root}/ground1f --annot chessboard --mode chessboard --pattern 11,8
step1: colmap标定背景帧:
colmap=<path/to/colmap>
# 使用colmap标定
python3 apps/calibration/calib_by_colmap.py ${root}/background1f ${root}/colmap --no_camera --share_camera --colmap ${colmap}
# 可视化检查结果
$colmap gui --database_path ${root}/colmap/background1f_000000/database.db --image_path ${root}/colmap/background1f_000000/images --import_path ${root}/colmap/background1f_000000/sparse/0
# 读取colmap参数
python3 apps/calibration/read_colmap.py ${root}/colmap/background1f_000000/sparse/0 .bin
# 对齐colmap结果
python3 apps/calibration/align_colmap_ground.py ${root}/colmap/background1f_000000/sparse/0 ${root}/colmap/align --plane_by_chessboard ${root}/ground1f
# 可视化检查对齐后的相机外参
python3 apps/calibration/check_calib.py ${root}/ground1f --mode cube --out ${root}/colmap/align --show --grid_step 0.42
# 定量检查外参
python3 apps/calibration/check_calib.py ${root}/ground1f --mode match --out ${root}/colmap/align --show --grid_step 0.42 --annot chessboard
(可选)使用人体关键点检查
python3 apps/preprocess/extract_keypoints.py ${root}/human1f --mode mp-holistic
python3 apps/calibration/check_calib.py ${root}/human1f --mode human --out ${root}/colmap/align --write --show --annot annots --hand
最后一步检查中,如果相机误差超过 1pixel(1000pixel的图片),通常被认为是误差过大。 检查colmap重建的点云质量,通常这种情况标定误差大是因为点云质量差。需要换用其他标定方法。 如果点云质量很好,标定结果误差大,可能是拍的棋盘格不同步,需要重新拍摄。
colmap标定:手动角点+场景扫描
整理数据如下所示:
├── background1f # 存放背景的单帧的结果
│ ├── images
│ └── scan.mp4 # 存放扫描的视频
└── ground1f # 存放放置棋盘格的结果
└── images
step0: 创建棋盘格并手动标注
# 创建角点
python3 apps/calibration/create_marker.py ${root}/ground1f --grid 0.6 0.42 --corner --overwrite
# 标注角点
python3 apps/annotation/annot_calib.py ${root}/ground1f --annot chessboard --mode chessboard --pattern 2,2
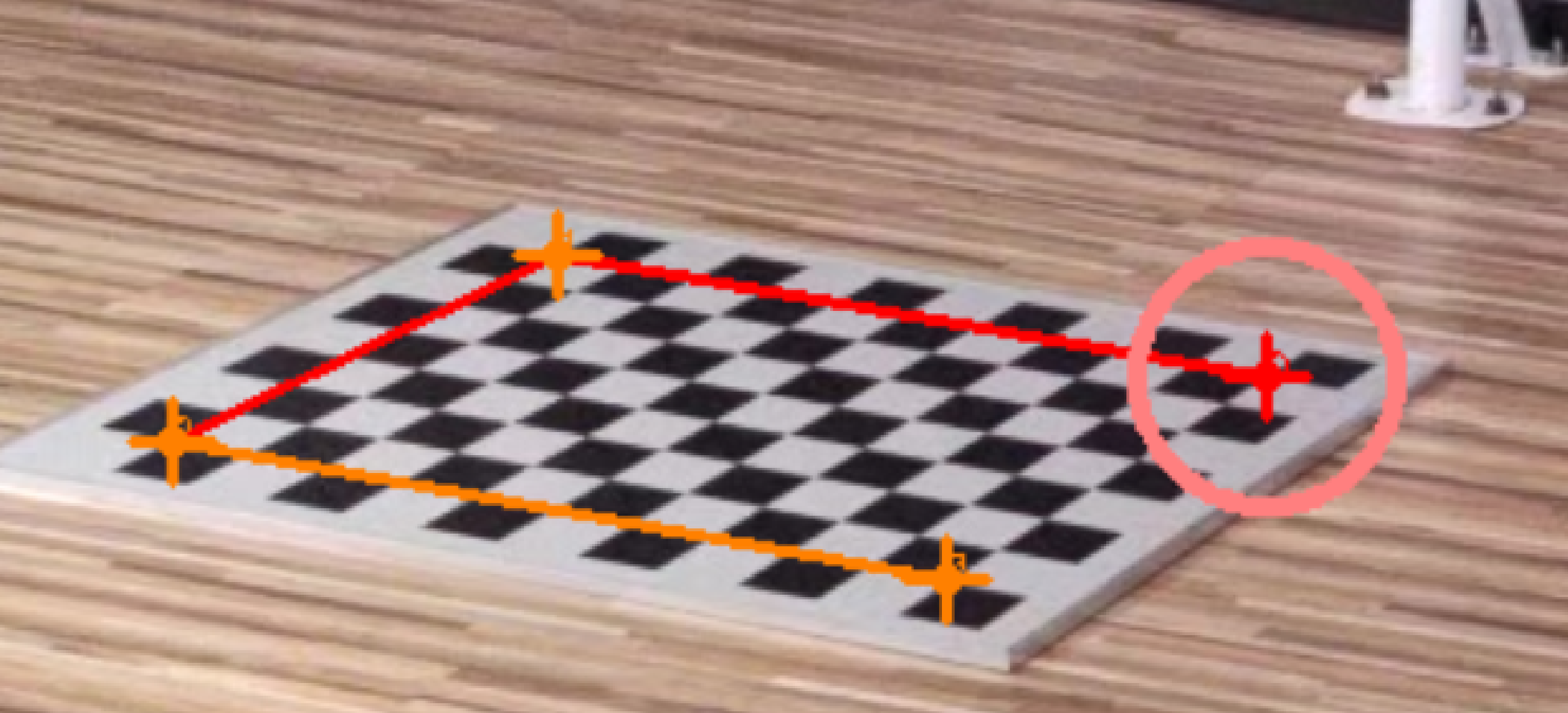
棋盘格不是中心对称的,标注的时候与示例对应。依次为右上角,左上角,左下角,右下角
step1: 同时标定scan数据和静止相机
# 使用colmap标定相机
python3 apps/calibration/calib_static_dynamic_by_colmap.py ${root}/background1f ${root}/colmap --colmap ${colmap} --num 400
# 对齐相机
python3 apps/calibration/align_colmap_ground.py ${root}/colmap/sparse/0 ${root}/colmap/align --plane_by_chessboard ${root}/ground1f --prefix static/
# 转换相机
python3 apps/calibration/colmap2nerf.py ${root}/colmap --camera ${root}/colmap/align --out ${root}/scan4nerf
# 检查相机
python3 apps/calibration/check_calib.py ${root}/ground1f --mode cube --out ${root}/scan4nerf/background1f --show --grid_step 0.6
python3 apps/calibration/check_calib.py ${root}/scan4nerf/scan --mode cube --out ${root}/scan4nerf/scan --show
python3 apps/calibration/check_calib.py ${root}/ground1f --mode match --out ${root}/scan4nerf/background1f --show --grid_step 0.6 --print3d --annot chessboard
# 确认相机参数没问题;拷贝相机参数
cp ${root}/scan4nerf/background1f/*.yml ${root}
cp ${root}/scan4nerf/background1f/*.yml ${root}/background1f
step2: 训练NeRF
# 检查背景mask
python3 apps/annotation/annot_mask.py ${root}/background1f --mask mask-background --static
# 检查背景的光照
python3 apps/annotation/annot_mv_sync.py ${root}/background1f --scale 0.3
# 训练背景NeRF
python3 apps/neuralbody/demo.py ${data} --mode danceroom-background --gpus 4,5,6,7
额外标注:背景中的物体
相机标定
主要操作:
shift+c:清除所有点q: 退出,在终端选择是否保存Q: 退出不保存鼠标选中框+e:对选中区域重新检测棋盘格
这一步需要清除掉所有的错误的检测;如果错误的太多,那么后续步骤就不会使用
重建
root=/nas/dataset/XiaoMiMocap/20220518dance2
python3 apps/annotation/annot_clip.py ${root}/data --mv
# 手动标注,标注完成后进行拷贝
python3 apps/annotation/annot_clip.py ${root}/data --mv --copy
cp ${out}/*.yml ${data}
# multiview fitting
python3 apps/demo/mocap.py ${data} --work mobilestage --exp smpl-3d --pids 0 1 2 --subs_vis VID_11 --subs VID_04 VID_05 VID_06 VID_08 VID_09 VID_10 VID_11 VID_12 VID_14 VID_15 VID_16 VID_17 VID_19 VID_20 VID_23 VID_24 VID_25 VID_29 VID_32 VID_33 VID_34 VID_35
# extract hand from 3d keypoints
python3 apps/preprocess/extract_hand_from_3d.py ${data} --k2d ${data}/output-keypoints3d/keypoints2d --k3d ${data}/output-keypoints3d/keypoints3d --out ${data}/output-keypoints3d/keypoints2d-hand
附录
1. ffmpeg旋转操作
| -vf | |
| 1 | 顺时针旋转画面90度 |
| 2 | 逆时针旋转画面90度 |
| 3 | 顺时针旋转画面90度再水平翻转 |
| 0 | 逆时针旋转画面90度水平翻转 |
| hflip | 水平翻转视频画面 |
| vflip | 垂直翻转视频画面 |