数据格式
- 考虑通用性,EasyMocap的所有数据使用相同的格式
- 考虑文件可读性与可迁移性,数据基本使用
.json格式存储,为了增加可读性,在输出到文件的时候需要进行format
目录结构
数据需要按以下格式存储:
<seq>
├── intri.yml
├── extri.yml
└── videos
├── 000001.mp4
├── 000002.mp4
├── 00000...
├── 000008.mp4
└── 000009.mp4
对于单目视频序列,如果没有相机参数,可不放置。
如果有图片,可直接存放图片。如果是以上视频,可使用脚本提取出图片:
python3 apps/preprocess/extract_image.py ${data}
提取后的数据目录需要如下所示:
<seq>
├── intri.yml
├── extri.yml
└── images
├── 1
│ ├── 000000.jpg
│ ├── 000001.jpg
│ ├── 000002.jpg
│ └── ...
├── 2
│ ├── 000000.jpg
│ ├── 000001.jpg
│ ├── 000002.jpg
│ └── ...
├── ...
├── ...
├── 8
│ ├── 000000.jpg
│ ├── 000001.jpg
│ ├── 000002.jpg
│ └── ...
└── 9
├── 000000.jpg
├── 000001.jpg
├── 000002.jpg
└── ...
请注意,如果有超过10个相机,并且如果使用数字命名的话,一定要给视频名称前面补0。
相机参数
For example, if the name of a video is 1.mp4, then there must exist K_1, dist_1 in intri.yml, and R_1((3, 1), rotation vector of camera), T_1(3, 1) in extri.yml. The file format is following OpenCV format.
相机参数的读写:参考easymocap/mytools/camera_utils.py=>write_camera, read_camera函数。
2D Pose
For each image, we record its 2D pose in a json file. For an image at root/images/1/000000.jpg, the 2D pose willl store at root/annots/1/000000.json. The content of the annotation file is:
{
"filename": "images/0/000000.jpg",
"height": <the height of image>,
"width": <the width of image>,
"annots:[
{
'personID': 0, # ID of person
'bbox': [l, t, r, b, conf],
'keypoints': [[x0, y0, c0], [x1, y1, c1], ..., [xn, yn, cn]],
'area': <the area of bbox>
},
{
'personID': 1, # ID of person
'bbox': [l, t, r, b, conf],
'keypoints': [[x0, y0, c0], [x1, y1, c1], ..., [xn, yn, cn]],
'area': <the area of bbox>
}
]
}
The definition of the keypoints is body25. If you want to use other definitions, you should add it to easymocap/dataset/config.py
If you use hand and face, the annot is defined as:
{
"personID": i,
"bbox": [l, t, r, b, conf],
"keypoints": [[x0, y0, c0], [x1, y1, c1], ..., [xn, yn, cn]],
"bbox_handl2d": [l, t, r, b, conf],
"bbox_handr2d": [l, t, r, b, conf],
"bbox_face2d": [l, t, r, b, conf],
"handl2d": [[x0, y0, c0], [x1, y1, c1], ..., [xn, yn, cn]],
"handr2d": [[x0, y0, c0], [x1, y1, c1], ..., [xn, yn, cn]],
"face2d": [[x0, y0, c0], [x1, y1, c1], ..., [xn, yn, cn]]
}
3D Pose
[
{
'id': <id>, # the person ID
'keypoints3d': [[x0, y0, z0, c0], [x1, y1, z0, c1], ..., [xn, yn, zn, cn]], # x,y,z is the 3D coordinates, c means the confidence of this joint. If the c=0, it means this joint is invisible.
},
{
'id': <id>, # the person ID
'keypoints3d': [[x0, y0, z0, c0], [x1, y1, z0, c1], ..., [xn, yn, zn, cn]], # x,y,z is the 3D coordinates, c means the confidence of this joint. If the c=0, it means this joint is invisible.
}
]
The definition of the keypoints can be found in easymocap/dataset/config.py. We main use the following formats:
- body25: 25 keypoints of body
- bodyhand: 25 body + 21 left hand + 21 right hand
- bodyhandface: 25 body + 21 left hand + 21 right hand + 51 face keypoints
SMPL参数
{
"id": <id>,
"Rh": <(1, 3)>,
"Th": <(1, 3)>,
"poses": <(1, 60)>,
"expression": <(1, 10)>,
"shapes": <(1, 10)>
}
SMPL骨架定义如图所示:
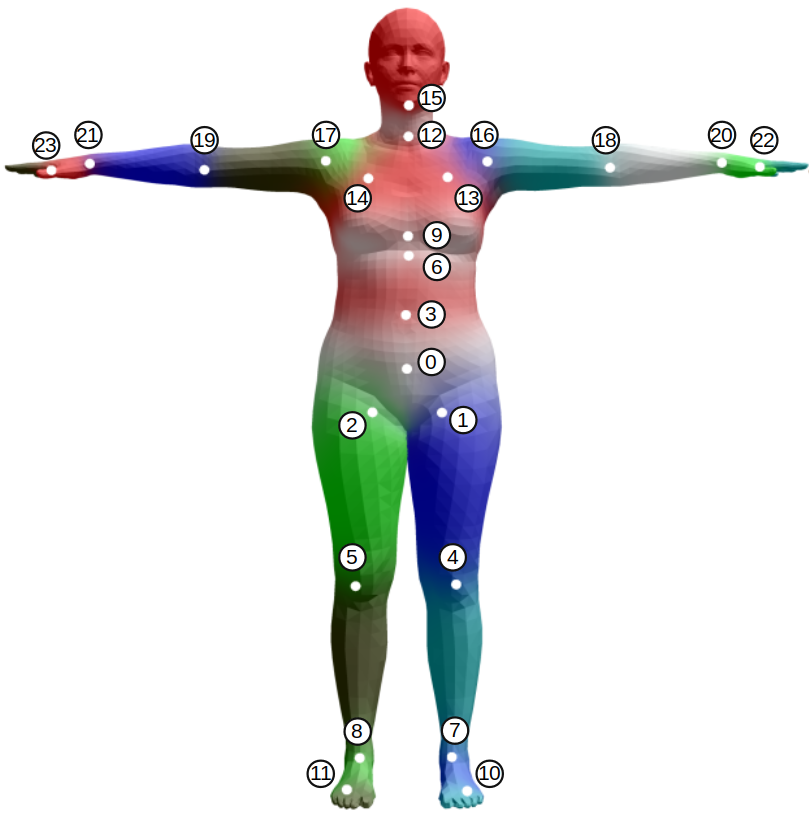
SMPL骨架定义
各个关节的旋转视频如下所示:
MANO的各个关节的旋转视频如图所示:
输出结果
- keypoints3dfit: 表示拟合的SMPL的关键点
- smpl_keypoints: 表示SMPL自身定义的关键点位置
导出到bvh
TODO
配置文件
本项目配置文件系统基于yacs库修改,主要增加的功能有:
- 实现parents功能,可以使得配置文件进行继承
- 实现
_parents_,使配置文件中的每一个模块都可以继承自其他文件
FAQ
- 输出的结果不包含模型信息
确实
- SMPLH, SMPLX的手部的参数在poses里面,容易混淆
确实
- MANO的时候手部的参数也叫poses,容易混淆
确实